Loading...
Searching...
No Matches
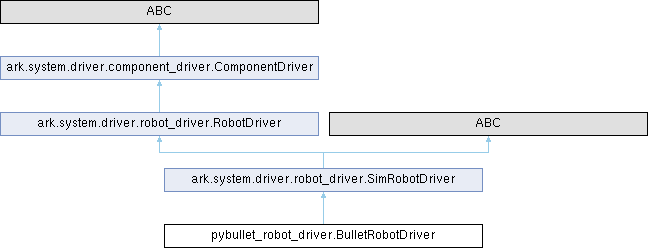
pybullet_robot_driver.BulletRobotDriver Class Reference
Inheritance diagram for pybullet_robot_driver.BulletRobotDriver:
Public Member Functions | |
| None | __init__ (self, component_name=str, Dict[str, Any] component_config=None, Any client=None) |
| Create a robot driver for PyBullet. | |
| None | load_robot (self, base_position=None, base_orientation=None, q_init=None) |
| Load the robot model into the simulator. | |
| bool | check_torque_status (self) |
| get infos ## | |
| Dict[str, float] | pass_joint_positions (self, List[str] joints) |
| Return the current joint positions. | |
| Dict[str, float] | pass_joint_velocities (self, List[str] joints) |
| Return the current joint velocities. | |
| Dict[str, float] | pass_joint_efforts (self, List[str] joints) |
| Return the current joint efforts. | |
| None | pass_joint_group_control_cmd (self, str control_mode, Dict[str, float] cmd, **kwargs) |
| control ## | |
| None | sim_reset (self, List[float] base_pos, List[float] base_orn, List[float] q_init) |
| misc. | |
| Public Member Functions inherited from ark.system.driver.robot_driver.SimRobotDriver | |
| None | __init__ (self, str component_name, Dict[str, Any] component_config=None, bool sim=True) |
| Initialize the simulation driver. | |
| None | shutdown_driver (self) |
| Shut down the simulation driver. | |
| Public Member Functions inherited from ark.system.driver.robot_driver.RobotDriver | |
| None | __init__ (self, str component_name, Dict[str, Any] component_config=None, bool sim=True) |
| Construct the driver. | |
| Public Member Functions inherited from ark.system.driver.component_driver.ComponentDriver | |
| None | __init__ (self, str component_name, Any component_config=None, bool sim=True) |
| Initialize the driver. | |
| is_sim (self) | |
| Return whether this driver is running in simulation mode. | |
Public Attributes | |
| client = client | |
| base_position = self.config.get("base_position", [0.0, 0.0, 0.0]) | |
| base_orientation = self.config.get("base_orientation", [0.0, 0.0, 0.0, 1.0]) | |
| initial_configuration = self.config.get("initial_configuration", [0.0] * self.client.getNumJoints(self.ref_body_id)) | |
| num_joints = self.client.getNumJoints(self.ref_body_id) | |
| dict | bullet_joint_infos = {} |
| dict | actuated_joints = {} |
| dict | joints = {} |
| ref_body_id | |
| Public Attributes inherited from ark.system.driver.component_driver.ComponentDriver | |
| component_name = component_name | |
| config = self._load_single_section(component_config, component_name) | |
| sim = sim | |
Additional Inherited Members | |
| Protected Member Functions inherited from ark.system.driver.component_driver.ComponentDriver | |
| _load_single_section (self, component_config, component_name) | |
| Load the configuration of a single component from a YAML file. | |
Detailed Description
Robot driver that interfaces with the PyBullet simulation.
Constructor & Destructor Documentation
◆ __init__()
| None pybullet_robot_driver.BulletRobotDriver.__init__ | ( | self, | |
| component_name = str, | |||
| Dict[str, Any] | component_config = None, | ||
| Any | client = None ) |
Create a robot driver for PyBullet.
- Parameters
-
component_name Name of the robot component. component_config Configuration dictionary for the robot. client Bullet client instance.
- Returns
- None
Member Function Documentation
◆ check_torque_status()
| bool pybullet_robot_driver.BulletRobotDriver.check_torque_status | ( | self | ) |
get infos ##
Return True as simulated robots are always torqued.
- Returns
- Always True in simulation. @rtype bool
Reimplemented from ark.system.driver.robot_driver.RobotDriver.
◆ load_robot()
| None pybullet_robot_driver.BulletRobotDriver.load_robot | ( | self, | |
| base_position = None, | |||
| base_orientation = None, | |||
| q_init = None ) |
Load the robot model into the simulator.
- Parameters
-
base_position Optional base position [x, y, z]. base_orientation Optional base orientation as quaternion. q_init Optional list of initial joint positions.
◆ pass_joint_efforts()
| Dict[str, float] pybullet_robot_driver.BulletRobotDriver.pass_joint_efforts | ( | self, | |
| List[str] | joints ) |
Return the current joint efforts.
- Parameters
-
joints List of joint names.
- Returns
- Dictionary from joint name to effort. @rtype Dict[str, float]
Reimplemented from ark.system.driver.robot_driver.RobotDriver.
◆ pass_joint_group_control_cmd()
| None pybullet_robot_driver.BulletRobotDriver.pass_joint_group_control_cmd | ( | self, | |
| str | control_mode, | ||
| Dict[str, float] | cmd, | ||
| ** | kwargs ) |
control ##
Send a control command to a group of joints.
- Parameters
-
control_mode One of position, velocity or torque. cmd Mapping from joint names to command values. kwargs Additional keyword arguments forwarded to PyBullet.
- Returns
- None
Reimplemented from ark.system.driver.robot_driver.RobotDriver.
◆ pass_joint_positions()
| Dict[str, float] pybullet_robot_driver.BulletRobotDriver.pass_joint_positions | ( | self, | |
| List[str] | joints ) |
Return the current joint positions.
- Parameters
-
joints List of joint names.
- Returns
- Dictionary from joint name to position. @rtype Dict[str, float]
Reimplemented from ark.system.driver.robot_driver.RobotDriver.
◆ pass_joint_velocities()
| Dict[str, float] pybullet_robot_driver.BulletRobotDriver.pass_joint_velocities | ( | self, | |
| List[str] | joints ) |
Return the current joint velocities.
- Parameters
-
joints List of joint names.
- Returns
- Dictionary from joint name to velocity. @rtype Dict[str, float]
Reimplemented from ark.system.driver.robot_driver.RobotDriver.
◆ sim_reset()
| None pybullet_robot_driver.BulletRobotDriver.sim_reset | ( | self, | |
| List[float] | base_pos, | ||
| List[float] | base_orn, | ||
| List[float] | q_init ) |
misc.
##
Reset the robot in the simulator.
- Parameters
-
base_pos New base position. base_orn New base orientation quaternion. q_init List of joint positions after the reset.
Reimplemented from ark.system.driver.robot_driver.SimRobotDriver.
Member Data Documentation
◆ actuated_joints
| dict pybullet_robot_driver.BulletRobotDriver.actuated_joints = {} |
◆ base_orientation
| pybullet_robot_driver.BulletRobotDriver.base_orientation = self.config.get("base_orientation", [0.0, 0.0, 0.0, 1.0]) |
◆ base_position
| pybullet_robot_driver.BulletRobotDriver.base_position = self.config.get("base_position", [0.0, 0.0, 0.0]) |
◆ bullet_joint_infos
| dict pybullet_robot_driver.BulletRobotDriver.bullet_joint_infos = {} |
◆ client
| pybullet_robot_driver.BulletRobotDriver.client = client |
◆ initial_configuration
| pybullet_robot_driver.BulletRobotDriver.initial_configuration = self.config.get("initial_configuration", [0.0] * self.client.getNumJoints(self.ref_body_id)) |
◆ joints
| dict pybullet_robot_driver.BulletRobotDriver.joints = {} |
◆ num_joints
| pybullet_robot_driver.BulletRobotDriver.num_joints = self.client.getNumJoints(self.ref_body_id) |
◆ ref_body_id
| pybullet_robot_driver.BulletRobotDriver.ref_body_id |
The documentation for this class was generated from the following file:
- ark/system/pybullet/pybullet_robot_driver.py