Loading...
Searching...
No Matches
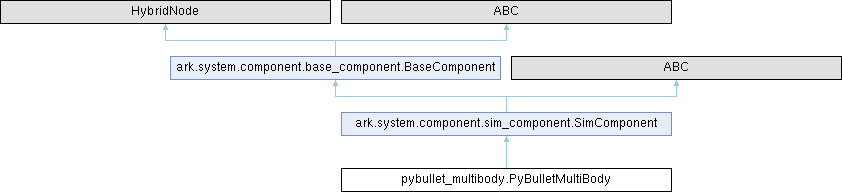
pybullet_multibody.PyBulletMultiBody Class Reference
Inheritance diagram for pybullet_multibody.PyBulletMultiBody:
Public Member Functions | |
| None | __init__ (self, str name, Any client, Dict[str, Any] global_config=None) |
| get_object_data (self) | |
| Return the current state of the simulated object. | |
| pack_data (self, data_dict) | |
| Convert a state dictionary to a rigid_body_state_t message. | |
| None | reset_component (self, channel, msg) |
| Reset the object pose using a message. | |
| Public Member Functions inherited from ark.system.component.sim_component.SimComponent | |
| None | __init__ (self, str name, Dict[str, Any] global_config=None) |
| step_component (self) | |
| Public Member Functions inherited from ark.system.component.base_component.BaseComponent | |
| None | __init__ (self, str name, Union[str, Dict[str, Any], Path] global_config) |
| None | component_channels_init (self, channels) |
Public Attributes | |
| client = client | |
| ref_body_id | |
| str | publisher_name = self.name + "/ground_truth/sim" |
| state_publisher = self.component_channels_init([(self.publisher_name, rigid_body_state_t)]) | |
| Public Attributes inherited from ark.system.component.sim_component.SimComponent | |
| config = self._load_config_section(global_config=global_config, name=name, type="objects") | |
| publish_ground_truth = self.config["publish_ground_truth"] | |
| str | reset_service_name = self.name + "/reset/sim/" |
| Public Attributes inherited from ark.system.component.base_component.BaseComponent | |
| name = name | |
| component_multi_publisher = self.create_multi_channel_publisher(channels) | |
Additional Inherited Members | |
| Protected Attributes inherited from ark.system.component.base_component.BaseComponent | |
| bool | _is_suspended = False |
Detailed Description
Utility class for creating PyBullet multi-body objects.
Constructor & Destructor Documentation
◆ __init__()
| None pybullet_multibody.PyBulletMultiBody.__init__ | ( | self, | |
| str | name, | ||
| Any | client, | ||
| Dict[str, Any] | global_config = None ) |
Instantiate a PyBulletMultiBody object. @param name Name of the object. @param client Bullet client used for creation. @param global_config Global configuration dictionary. @return ``None``
Member Function Documentation
◆ get_object_data()
| pybullet_multibody.PyBulletMultiBody.get_object_data | ( | self | ) |
Return the current state of the simulated object.
- Returns
- Dictionary with position, orientation and velocities of the object. @rtype Dict[str, Any]
Reimplemented from ark.system.component.sim_component.SimComponent.
◆ pack_data()
| pybullet_multibody.PyBulletMultiBody.pack_data | ( | self, | |
| data_dict ) |
Convert a state dictionary to a rigid_body_state_t message.
- Parameters
-
data_dict Dictionary as returned by :func:get_object_data.
- Returns
- Mapping suitable for :class:MultiChannelPublisher. @rtype Dict[str, rigid_body_state_t]
Reimplemented from ark.system.component.sim_component.SimComponent.
◆ reset_component()
| None pybullet_multibody.PyBulletMultiBody.reset_component | ( | self, | |
| channel, | |||
| msg ) |
Reset the object pose using a message.
- Parameters
-
channel LCM channel on which the reset request was received. msg rigid_body_state_t containing the desired pose.
- Returns
- flag_t acknowledging the reset.
Reimplemented from ark.system.component.sim_component.SimComponent.
Member Data Documentation
◆ client
| pybullet_multibody.PyBulletMultiBody.client = client |
◆ publisher_name
| str pybullet_multibody.PyBulletMultiBody.publisher_name = self.name + "/ground_truth/sim" |
◆ ref_body_id
| pybullet_multibody.PyBulletMultiBody.ref_body_id |
Initial value:
= client.loadURDF(fileName=urdf_path,
basePosition=base_position,
baseOrientation=base_orientation,
globalScaling=global_scaling,
useMaximalCoordinates=1)
◆ state_publisher
| pybullet_multibody.PyBulletMultiBody.state_publisher = self.component_channels_init([(self.publisher_name, rigid_body_state_t)]) |
The documentation for this class was generated from the following file:
- ark/system/pybullet/pybullet_multibody.py